Week 5 - Investigating Camera Calibration
Hi there! Welcome to my blog post for the fifth week. It was a fairly short week due to the Labour Day holiday (I hope you enjoyed it). For this week, I focused on researching camera calibration.
Note: It is highly recommended to view this blog post on my personal blog site: https://www.jessexu.me/basis-senior-project/week5/
See it yourself!
If you followed my blog posts before, you know it, here’s the demo that you can try by yourself: https://senior-project.jessexu.me/?file_selection=Week+5
What is camera calibration?
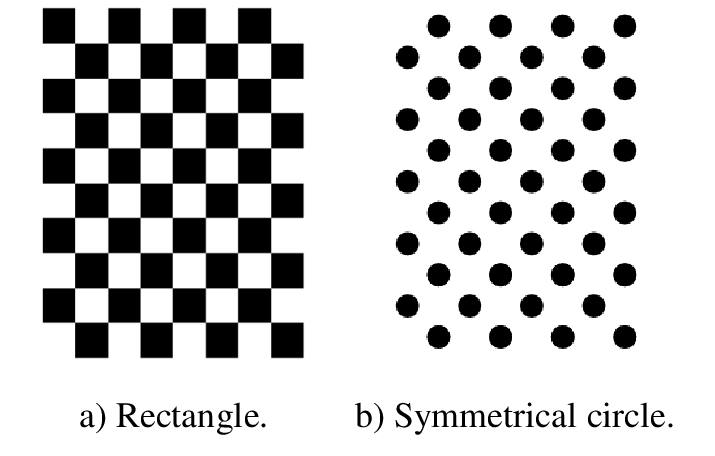
Camera calibration allows us to get the intrinsic parameters, extrinsic parameters, and distortion coefficients of a camera. With these parameters, we may remove camera lens distortion, measure lengths, and more. We usually use a checkerboard pattern or a symmetrical circles pattern to calibrate the camera, since these shapes can be easily recognized by computer algorithms. In my case, I will use a checkerboard pattern for camera calibration because it’s the most used method.
If you want to learn more about camera calibration, MathWorks has a decent explanation of it: https://www.mathworks.com/help/vision/ug/camera-calibration.html
Preliminary work I did
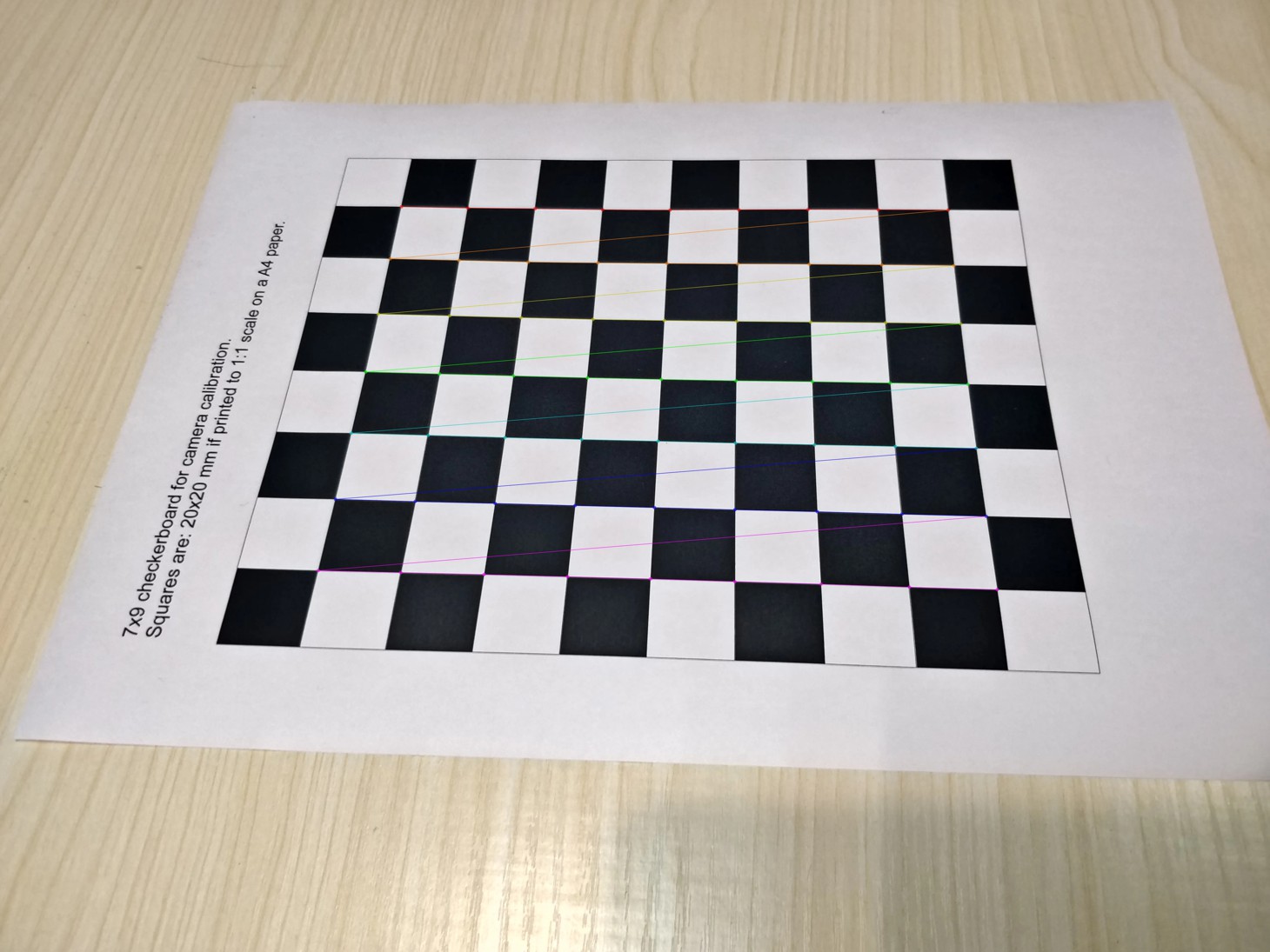
I did not do much since it was a short week. Since I don’t have easy access to the microscopic camera that will be used in production and find an appropriately sized checkerboard for the microscopic camera easily, I decided to experiment with my phone’s camera. I printed off a 7*9 checkerboard pattern with each square being 20*20 mm, and took a picture of the checkerboard with my phone. I then put it into OpenCV to see if the checkerboard pattern can be detected. It turns out that the checkerboard got detected perfectly.
Summary
This week, I started investigating on camera calibration and ran a test on recognizing the checkerboard pattern. Next week, I will try to get the parameters of the camera through camera calibration.